


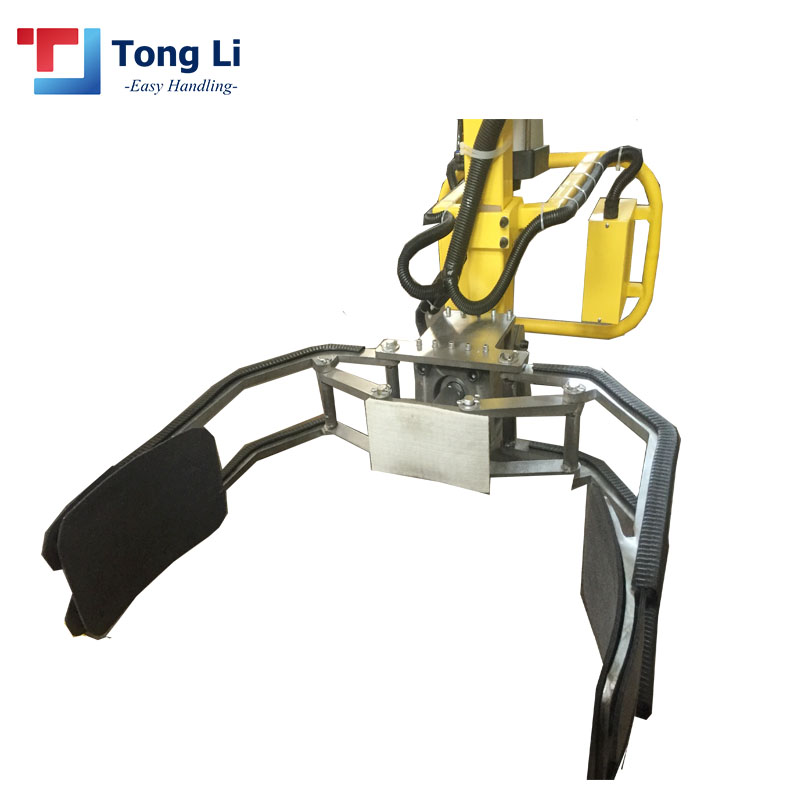


Manipulator sa stezaljkom
Uvod
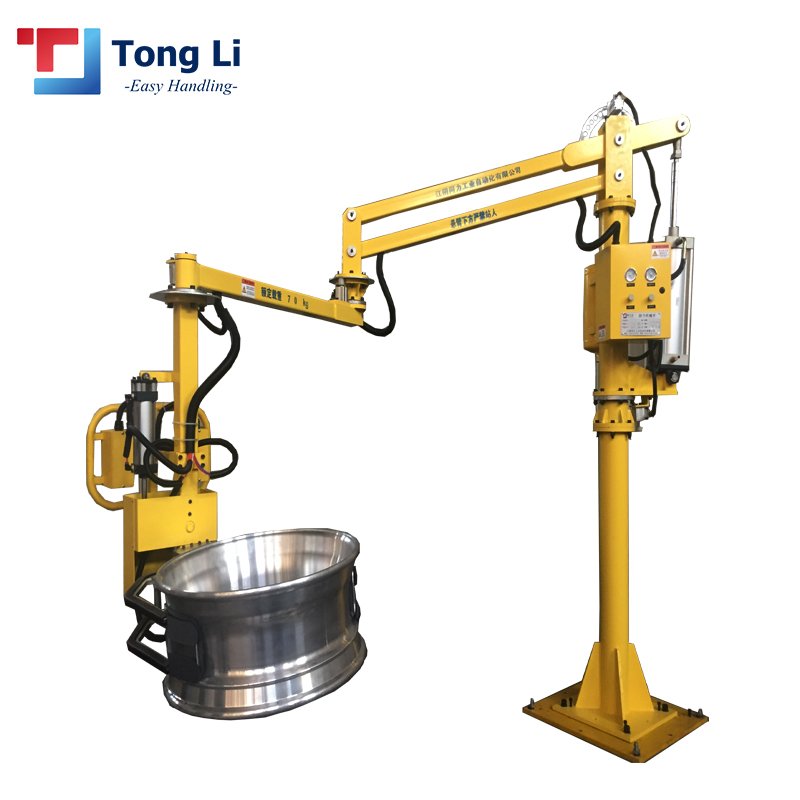
a) Manipulator s istom silom i pomoćnom rukom može uravnotežiti različite težine od 2 do 500 kg.
b) Manipulator s pogonom sastoji se od ravnotežnog nosača, hvataljke i instalacijske konstrukcije.
c) Glavni uređaj manipulatora je onaj koji ostvaruje negravitacijsko lebdeće stanje materijala (ili obradaka) u zraku.
d) Manipulator je uređaj koji ostvaruje hvatanje obratka i ispunjava odgovarajuće zahtjeve korisnika za rukovanje i montažu.
e) Instalacijska struktura je mehanizam koji podržava cijeli skup opreme prema korisničkom području usluge i uvjetima na lokaciji.

| Model opreme | TLJXS-YB-50 | TLJXS-YB-100 | TLJXS-YB-200 | TLJXS-YB-300 |
| Kapacitet | 50 kg | 100 kg | 200 kg | 300 kg |
| Radni radijus | 2500 mm | 2500 mm | 2500 mm | 2500 mm |
| Visina podizanja | 1500 mm | 1500 mm | 1500 mm | 1500 mm |
| Tlak zraka | 0,5-0,8 MPa | 0,5-0,8 MPa | 0,5-0,8 MPa | 0,5-0,8 MPa |
| Kut rotacije A | 360° | 360° | 360° | 360° |
| Kut rotacije B | 300° | 300° | 300° | 300° |
| Kut rotacije C | 360° | 360° | 360° | 360° |






a) Može ostvariti stanje gravitacijske ravnoteže materijala različite težine, što je pogodno za precizan prijenos materijala.
b) Kada se obrađuju bez opterećenja, s punim opterećenjem i različiti obratci, sustav može osjetiti promjenu težine i ostvariti plutajuće stanje opterećenja u trodimenzionalnom prostoru, što je pogodno za precizno pozicioniranje.
c) Karakteristike potpune ravnoteže, glatkog kretanja itd. omogućuju operateru jednostavno rukovanje, pozicioniranje i sastavljanje obratka.
d) Kruta ruka može omogućiti manipulatoru da nosi obradak preko prepreka; horizontalna ruka može zadovoljiti zahtjeve horizontalnog postavljanja i horizontalnog uklanjanja materijala na odgovarajućim mjestima.
e) Sustav može uvijek održavati razinu glave manipulatora i postići visoku obradivost.
f) Zglobni uređaj za kočenje, s više rotacijskih zglobova za ostvarivanje uzimanja i postavljanja materijala na širokom području; opremljen uređajem za kočenje, operater može prekinuti kretanje manipulatora u bilo kojem trenutku tijekom rada.



Ova vrsta električnog manipulatora može postići podizanje obratka do 500 kg. Radni radijus je oko 2500 mm, a visina podizanja oko 1500 mm. Ovisno o težini obratka koji se podiže, treba odabrati najmanji tip stroja u skladu s maksimalnom težinom obratka. Ako koristimo maksimalno opterećenje manipulatora od 200 kg za nošenje 30 kg obratka, tada performanse rada sigurno neće biti dobre, osjećat će se vrlo teško. Oprema je standardno opremljena spremnikom zraka, koji i dalje može dovršiti radni ciklus u slučaju nestanka plina. Istovremeno će se oglasiti alarm kako bi podsjetio operatera. Kada tlak zraka padne do određene mjere, pokrenut će se funkcija samozaključavanja kako bi se spriječilo pad obratka. Manipulator sa sigurnosnim sustavom, tijekom procesa rukovanja ili ako obratak nije postavljen u sigurnu stanicu, operater ne može otpustiti obratak. S raznim nestandardnim pričvrsnim elementima, električni manipulator s tvrdom rukom može lako dovršiti razne procesne radnje.





